客服热线:
客服热线: 中央空调风管清洗机器人的研究
摘要:为了提高中央空调和通风系统的清洗方法,其中空间是有限的,并且不能检测缺陷,与中央空调管道清洁机器人来代替手动操作,以人为本设计进行清洁机器人。通过清洗过程中,管道尺寸和机器人分析的运动范围,中央空气管道清洁机器人,履带运动的设计,以保证在管和管道清洗可靠性标准的机器人的操作。进行的结构特点,工作原理,结构设计和控制方案的条款的制定,原型可以在中央空调中使用,清洗的做法,方便,易于清洁,节能,环保和健康。
关键词:中央空调风道清洗
0、引言
在国外,空调需要清洗是常识,空调清洗已经很发达;但在中国,由于空调刚刚大范围流行,清洁行业还没有发展起来,市场潜力很大。随着越来越多的人意识到空调需要彻底清洗,简单的清洗过滤器和外壳已经不能满足要求。自20世纪70年代末80年代初以来,国外一直重视中央空调管道的清洗,在1990年前后得到了广泛的实施,并建立了相应的行业和国家标准。
在发达国家已经设置了中央空调风管清洗协会,并已形成了完整的产业,中央空调风管清洗国外已经形成产业化管道。中国仍处于起步阶段,国内一些企业生产的管道清洁机器人大多是假冒伪劣产品,以多单为主的技术性能,常因无法有效监控清洗这样的时间清洗效果不能保证,除了可靠性,适应性等方面有一定的局限性。中央空调作为“办公室之肺”,洗了通风系统,确保空气质量的重要组成部分,但以下限制清洗中央空调通风系统:
(1) 空间限制。在我国,中央空调通风系统风管的尺寸和直径都小于600毫米,几乎不可能人工进入清洗。
(2)无法监测。一些风管即使可以人工清洗,清洗后也不能有效监测,清洗效果也不能保证。
对于这种情况,本文提出了一种新的中心空气管道清洁机器人装置,该装置使用双DC马达驱动轨道结构中,车轮中的球轴承结构所使用的,具有驱动强,弹性和稳定行驶,速度容易,操作简单性能优良,操作工人只需观察监视器或计算机监视器屏幕来调节和控制所述机器人到操作臂的清洗消毒。该机器人主要是基于共同的空调的要求,使多个不同的清洁溶液,然后根据每个过程对应于机器人的操作状态的实际需要做出不同的处理在每一个实施例。根据不同客户的需求,实现对空调进行清洁。

1、总体结构及工作原理
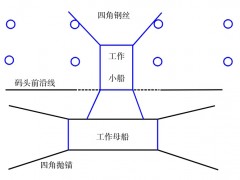
清洁中央空调管道的机器人实心图。
机器人包括的性能的主要部分:
(1) 机械系统。设备的机械系统主要包括:行走轮和轨道、平台和灯具、升降电动推杆、机械臂和清扫臂。设计了一种特殊的履带式传动系统。其主要特点是:专用耐磨高摩擦工业履带确保了机器人长期、繁重的工作负荷使用,同时保证了机器人抓握的牢固性。履带传动结构的特殊设计使机器人能够爬过60mm垂直障碍物和40°坡度。运动系统由两套功能强大的动力机构组成,完全独立控制。摇臂设计使机器人在管道中灵活移动,完成前后直线运动和任意角度的转动动作。整机速度最大为0无级可调。转弯可以通过同时向前和向后移动来控制,从而达到原地360°转弯的目的,也可以通过同时停车和向前(向后)移动来控制,从而达到沿物体转弯的目的。
(2)监控视频系统。该设备的监控视频系统设计为一个相对独立的单元,其主要特点是:整个视频采集系统包含一个高清晰度、低照度的摄像机,以保证低光照下的彩色图像效果。独立视角调节系统可以完成独立的水平方向360°旋转和仰角180°旋转,照明光与摄像机同时移动,便于机器人在平板管道和大管道中进行检测,无需任何观察死角,照明系统采用发光二极管,热小,适合长时间工作。视频采集信号可以直接显示在带有其自身监控显示的控制盒上,也可以通过视频监控盒直接显示在膝上型计算机显示器上。同时,内存可以被抑制,如果必要的话,它可以被烧录和存储。
(3)清洁和消毒系统。的清洁和消毒设备控制系统可以调整高度,被设计为2:1)清洁具有2种矩形和圆形管清洁刷通用260毫米直径尼龙刷的清洁刷头部分,可以互换。 2个模型是可以互换的,易于清洗头。刷专门清洗2个刷毛和外侧倾斜之间矩形管道,凝聚相干向外,所述具有侧壁良好的清洁能力,清洁无死角期间刷设计。 2)消毒喷雾头管部和外梭流体的一部分,通过在管道的内壁均匀地泵送喷雾消毒。消毒系统喷嘴头高度一般为所述管道的高度的2/3。
(4) 控制系统。控制系统主要包括摇臂控制模块、清洗刷控制模块、机械臂提升控制模块、速度控制模块、云台控制模块。控制系统采用交流220伏,50赫兹输入,直流安全电压小于36伏输出。它配有笔记本电脑。机器人的工作速度可从0-15m/min调节,整个控制面板操作简单方便。
2、机器人主要技术参数的设计
分析中央空气管道清洁机器人的工作流程,以确定所述机器人装置的各部件的基本结构,根据清洗管道的长度的参数,并且宽度和圆形管道和负载要求的直径,确定的这个尺寸装置主体的具体结构,对设计原型整个组织的基础上。另外,还要考虑机器人,搬运,外观等问题的安全。在表1中示出的特定设计的机器人主要技术参数。
3、控制系统方案
设计了机器人控制系统的总体方案,采用AC220V电源,计算机电源(功率小于100W)采用动力照明开关,按下开关,内部指示灯亮,头灯亮,控制箱整体通电。按下此开关时,必须连接控制箱、集成电缆和机器人。
摇臂开关用于控制机器人机构的前、后、转动作。清洁刷的转向控制模块是根据实际需要对开关进行控制,一般是机器人的前进方向。从机器人的左侧,底面顺时针旋转,其余三面逆时针旋转。机械手升降控制模块用于调节清洗强度、高度和消毒喷雾高度。这组开关由上下行程控制。当到达顶部或底部时,推杆就会停止。只有按下反向开关,推杆才能继续。消毒喷头应小于空气管的一半,小于2:3。按下开关后,机器人进入无级调速状态(清洗臂除外),机器行走速度和机械手升降速度可调。转速由以下调速电位器控制,适用于半径小、调节机械手高度精细的车削。采用云平台控制力矩模块,用这组开关控制摄像机的角度。正常运动时,将摄像机保持在机器人身体的中间,即观察显示器上可以观察到的机械手或前轮是在画面的中间还是两边,在清理风管时可以看到摄像机。当你按下扭转,不要移动,为了达到冲程,按下反向按钮。控制输出和视频输入模块连接集成电缆和RCA莲花插头来传输和控制视频信号。所述插头插入在所述航空插头的凹凸极限后。插头的最大凸出在顶部,并带显示器来显示视频输入的内容。当您需要记录时,将视频信号输出的Lotus插头连接到用于记录的监控框的视频输入(黄色)。
该机器人系统的工作原理如下:系统自检,确认系统是否工作正常,如果不正常,报警,如果检测系统在机械原点正常,如果不是在原点之后,进行原点搜索,原点搜索完成时,所述触摸屏通信,并接受在自动控制的情况下的触摸屏控制。
通过触摸屏发送系统转发信号,系统自动运行。运行进程后,等待并执行下一个触摸屏发送的控制命令。控制流。
4、结语
与计算机网络技术一样,中央空调管道清洗机器人的广泛应用也日益改变着人类的生活环境。在此发展趋势下,本文设计了中央空调管道清洗机器人,取代人工清洗各种形状的中央空调空调管,重复性简单,劳动强度高,提高了清洗工作的自动化程度,提高了生产率,降低了生产成本。
机器人可以进入管公园上述150毫米或350毫米的扁平的矩形管的直径;清洁刷可以达到上述650毫米的高度;利用计算机视频监视器,以便于监测数据存储,分析,检索,进位技术; LED照明具有高亮度,亮度高,发热量低,寿命长。后粉尘管清洗的量应在不检测残余的污染物的到达后表面小于1.0克,每平方管道中的清洁构件。细菌的管道总数的消毒的内壁,总除去率应大于90%的真菌,细菌不能被检测到。