客服热线:
客服热线: 风压式高层建筑外墙清洗机的控制系统
提出了风压式高层建筑外墙清洗机对控制系统的要求;制定了以单片机为核心、双机通信的控制方案;分析了系统硬件的工作原理和实现方法;论述了系统的软件设计方案及相关问题的处理。经过仿真运行表明,该系统工作稳定、运行可靠。
国内外大中城市的高楼大厦鳞次栉比,为了满足环保要求、提升城市和企业形象,高层建筑外墙的定期清洗已经成为日益壮大的行业。对大型楼宇的外墙清洗,成熟的技术仍然为高空吊篮和蜘蛛人人工清洗。由于清洗效率低、劳动强度大、危险性高、高空反应对人体的损害极为明显,因而清洗成本很高,1座大型高层建筑清洗1次需要十几乃至几十万元。国内外根据这一市场需求研制了一些旨在降低清洗成本、解脱危险工作环境的无人化自动清洗的装置,但多为以真空吸盘来提供清洗力和行走动力的爬壁机器人。由于方案的先天不足,其工作的稳定性过分地依赖于墙壁的光滑程度,给产品化带来极大障碍。笔者等所设计的以后置螺旋桨产生清洗力和行走动力的智能清洗机,从根本上解决了这一问题。对该清洗机除了设计出结构新颖的机械执行系统(已获得国家专利)外,还设计了以计算机为中心、双机通信的智能控制系统,其软硬件已经通过了调试和仿真运行。本文主要介绍了满足清洗机要求的控制方案和工作原理,论述了该系统软硬件设计的原理和实现方法。

1、清洗机机械装置对控制系统的要求及功能实现
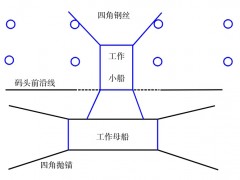
风压式高层外墙清洗机机械装置由伺服悬吊系统和清洗主机组成,伺服悬吊系统和清洗主机通过由承载缆、动力缆、清洗液和清水水管及控制缆复合而成的复合缆相连,其控制系统的任务主要是满足这两部分的控制要求。
1.1纵向行走
伺服悬吊系统的卷扬电机控制:直流电机,采用脉宽调速方法控制行走速度,通过复合缆的收放实现沿墙面的上下清洗。
1.2横向行走
伺服悬吊系统的行走机构控制:三相交流电机,Y-Δ变换实现2种速度,采用继电器控制启动、停止。清洗主机的行走机构控制:步进电机,采用步进电机驱动电源控制,与伺服悬吊系统的横向行走同步。两行走机构的运动同步控制:由位于伺服悬吊系统吊臂端部的2个超声波传感器检测复合缆的摆动,对单片机输出数字量,由单片机控制清洗主机与悬吊系统同步行走,以实现清洗机沿墙面的水平清洗。
1.3推力螺旋桨,清洗刷,水泵
推力螺旋桨、清洗刷位于清洗主机上,用Y-Δ变换实现2种速度以控制刷洗力和清洗刷转速;清洗液和清水水泵位于伺服悬吊系统,通过复合缆传输至清洗刷,它们都采用继电器控制。
1.4刷洗部件旋转90°
位于清洗主机的刷洗部件旋转90°以实现上下清洗与水平清洗的转换;步进电机,采用步进电机驱动电源控制。
1.5边缘识别
清洗主机在工作过程中行至楼面边缘和上下极限位置时,需要停止和转向,采用清洗主机上、下、左、右的4个超声波传感器(探头)对单片机输出数字量,以实现清洗机的启、停和行走方向的切换。
1.6行走机构的运动保持
行走机构位于清洗主机,采用继电器控制,对清洗主机的横向行走的2个输入控制口保持高电平,以实现对清洗主机的横向行走的自动保持。
2、控制方案概述
整个清洗机系统的控制方案。
1)整个控制系统采用2个单片机进行控制,伺服悬吊系统和清洗主机各放置1个单片机,伺服悬吊系统的单片机作为主控方,对清洗机上的单片机发出控制指令,清洗机上的单片机作为受控方,执行单片机上的指令,但它不对伺服悬吊系统上的单片机返回状态信息。两机之间单向通信,协调工作。本控制系统选择双机通信的理由:①组成整个系统的伺服悬吊装置和清洗主机各有各的控制要求,采用双机通讯有利于均衡负荷、提高指令的执行速度;②充分利用单片机现有输入、输出口而不需扩充;③两机之间的串行通讯有利于减少控制连线,从而提高通讯的可靠性。通过执行指令,单片机发出电脉冲或波形,通过硬件驱动电路放大,进而驱动电机动作。
2)对继电器的控制,单片机通过1个输出口对其控制启、停。由单片机输出一个恒定持续的高电平来驱动继电器,在命令输入方面,对控制继电器的输入采用不保持按扭,由单片机实现高电平的保持。对步进电机的控制采用环形分配器加恒流源驱动电源。单片机采用2个输出口,一个端口输出一个持续脉冲用来驱动步进电机,另一个端口输出一个高电平或低电平用来控制电机的正反转;在命令输入方面,采用不保持按扭。对直流电机的控制,采用持续的脉冲驱动。由单片机的2个端口分别(不同时)输出脉冲来驱动直流电机,由脉冲在不同的端口的输出来控制其正反转;在命令输入方面,采用保持按扭,由按扭保持高电平的持续的输出。对三相交流电机,采用继电器控制。在命令输入方面,采用不保持按钮;在命令输出方面,单片机采用2个输出口,通过改变输出口的高低电平来改变电机的正反转;在端口输出高电平时继电器被驱动,进而利用继电器对电机控制。在边缘识别和自动控制方面采用行程开关、超声波传感器,由单片机通过这些传感器检测外部信号,从而实现单片机的自动控制。
3、控制部分硬件电路的工作原理
3.1单片机系统的组成
以89C52为基础,扩展MAX485通信芯片、看门狗电路、脉冲速度检测电路、收发缓冲器、按键中断输入、光耦隔离、12V电源输出和各种产生脉冲信号的探头。
3.2驱动部分的工作原理
以卷扬机直流电机,横向行走、泵、风扇、刷子交流电机,清洗机横向行走、转90°步进电机为被控对象,各种继电器及驱动电源组成。
3.3软件对硬件的要求
1)横向行走电机要求:开关按下后,立刻自动跳起。
2)水泵,风扇,清洗刷要求:开关按下后,立刻自动跳起,在清洗机上由1个p1.4口控制,同时控制风扇、清洗刷的起停,由1个口实现对2个继电器的同时控制。
3)总停要求:开关按下后,立刻自动跳起。
4)清洗部件转90°的正反转要求:开关按下后,立刻自动跳起,清洗机部分的输入口p0.4,p0.5为内部自动检测,并在外部安装行程开关。横向正反同步要求:机架部分的输入p0.7,p2.0为超声波传感器的输入。
1)卷扬机要求:机架卷扬机为直流电机,要输出脉冲,开关按下后要保持。
2)边缘识别用超声波传感器要求:超声波传感器分别接在伺服悬吊系统和清洗机的单片机4个输入口上。清洗机的横向行走的自动保持要求:对清洗机部分的p0.6,p0.7在接到通信01H,02H后,要用继电器对它们保持高电平,接到04H后,要使继电器停止动作。
4、软件设计的技术基础及相关问题的处理
4.1控制系统的软件设计方案
软件系统的设计采用模块化程序结构,给出了依据控制方案。
4.2关于伺服悬吊系统与清洗主机之间的通信
系统的通信分为通信发送(来自位于悬吊系统的主单片机)和通信接收(到达位于清洗主机的从单片机)两部分。按通信的种类又可分为确认通信和不确认通信,所谓确认通信就是发送方在发送完数据后,开始等待,直到接收方发回确认信息,表示数据正确接收完毕,然后才去执行下一条指令;而接收方在接收到信息后不是马上去处理,而是向发送方返回1个确认码,表示信息正确接收完毕,然后才去处理数据。不确认通信的通信方法与确认通信相似,但发送方和接收方不接收和发送确认码。确认通信提高了通信的正确性,但以增加系统开销为代价,对于要求快速反应的系统不太适合;不确认发送反应速度快,但降低了通信的质量,不过这个缺陷可通过连续发送多次信息加以弥补。本系统采用的是不确认通信。
通信发送时首先要打开发送使能,并且发送中断清零,当数据发送完毕时,发送中断自动置1,通知系统发送完毕,如果需要再次发送,就要手动清除中断标志1,这是关键。由于采用不确认通信,所以每次通信都连续发送5次,不能太多,否则影响反映速度,根据实验检测,效果很好。
通信接收是由系统自动中断完成,首先要打开接收使能,然后接收中断清零,接收数据完毕后,接收中断自动置1,通知系统处理,处理后,也要把接收中断再次手动清零。
4.3调速
本系统的调速方法为脉宽调速。通过设置延时参数来控制延时时间的长短,所以调速的关键是选取合适的延时参数。对于延时参数的确定要通过实验来解决。
5、结束语
由以上双机通讯所构成的控制系统不仅满足了高层外墙清洗机工作的控制要求,而且价格低廉,经仿真运行性能稳定,工作可靠,有利于实现产品化并具有可观的经济效益。